Research
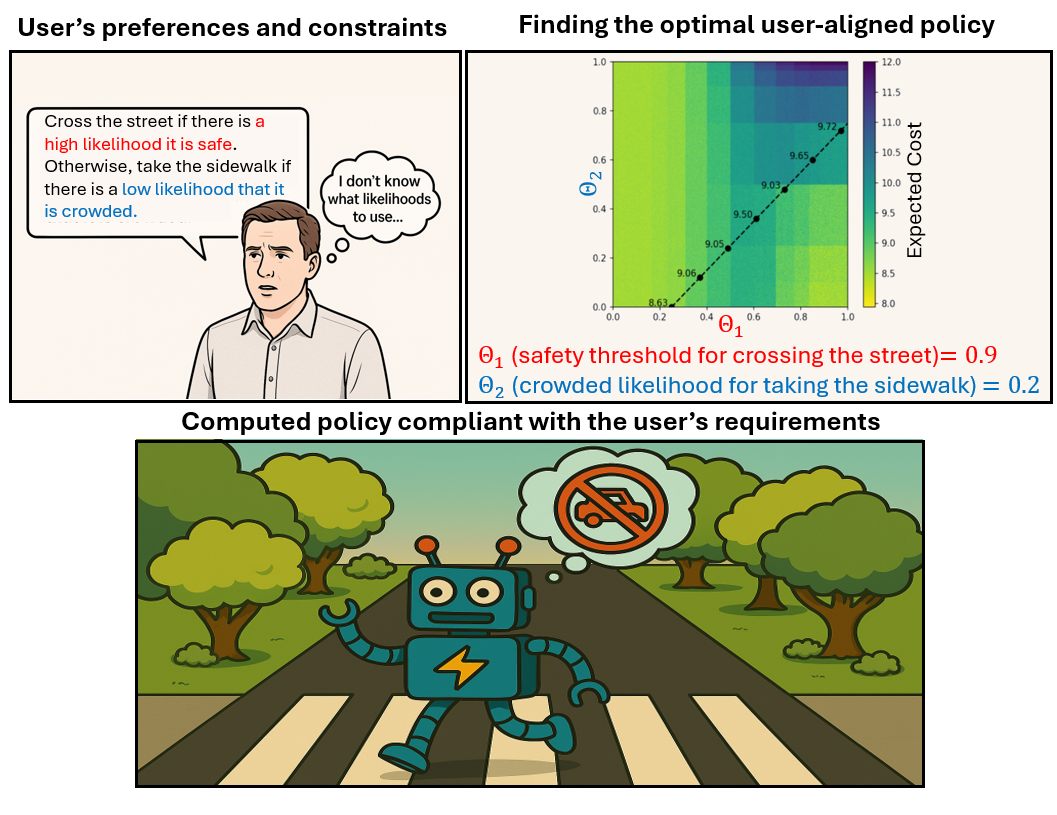
User-Aligned Planning in Partially Observable Environments
Can we align an AI system with users' expectations when it has limited, noisy information about the real world? How do we refine a user's high-level, imprecise requirements into an executable behavior for the agent?
We are developing novel frameworks that allow users to express preferences and constraints on agents' behavior in partially-observable settings. Early results show strong properties of convergence to the optimal user-aligned behavior.
Papers:
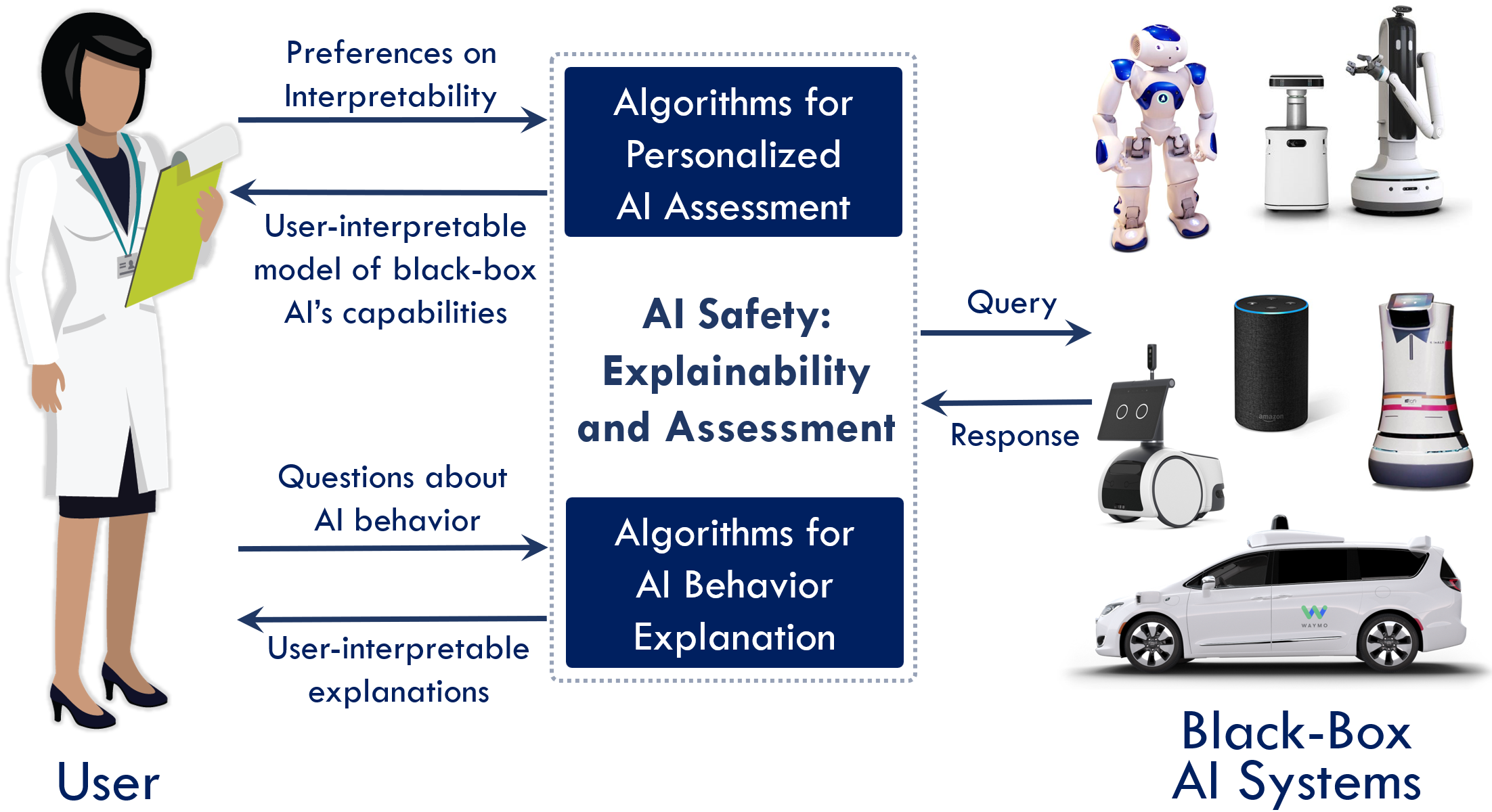
Autonomous Agents That Are Easy to Understand and Safe to Work With
How would a non-expert assess what their AI system can or can’t do safely? Today’s AI systems require experts to evaluate them, which limits the deployability and safe usability of AI systems.
We are developing approaches for autonomous, user-driven assessment of the capabilities of black-box taskable AI systems, even as the AI systems learn and adapt. These methods would enable users to continually evaluate and understand their AI systems in their own idiosyncratic deployments. They would prevent performance failures and accidents that can arise when AI systems are used beyond their dynamic envelopes of safe applicability. We are also designing approaches for computing user-aligned explanations of AI behavior. Together, these approaches improve the safety and usability of AI systems and enable autonomous, on-the-fly training paradigms for AI systems.
Papers:
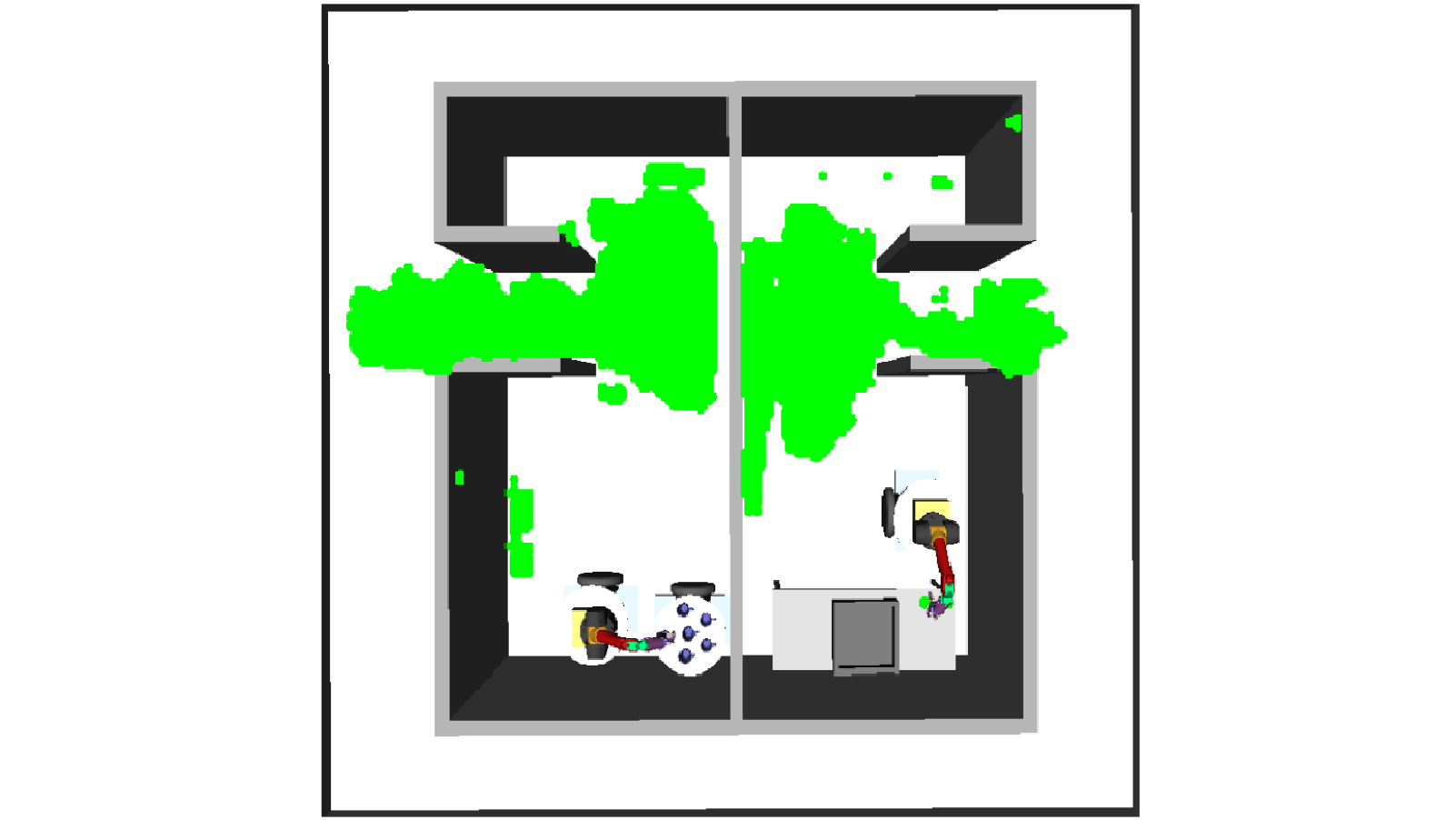
Synthesis and Analysis of Abstractions for Autonomy
In order to solve complex, long-horizon tasks such as doing the laundry, a robot needs to compute high-level strategies (e.g., would it be useful to put all the dirty clothes in a basket first?) as well as the joint movements that it should execute. Unfortunately, approaches for high-level planning rely on task-planning abstractions that are lossy and can produce “solutions” that have no feasible executions.
We are developing new methods for computing safe task-planning abstractions and for dynamically refining the task-planning abstraction to produce combined task and motion plans that are guaranteed to be executable. We are also working on utilizing abstractions in sequential decision making (SDM) for evaluating the effect of abstractions on models for SDM, as well as to search for abstractions that would aid in solving a given SDM problem.
Papers:
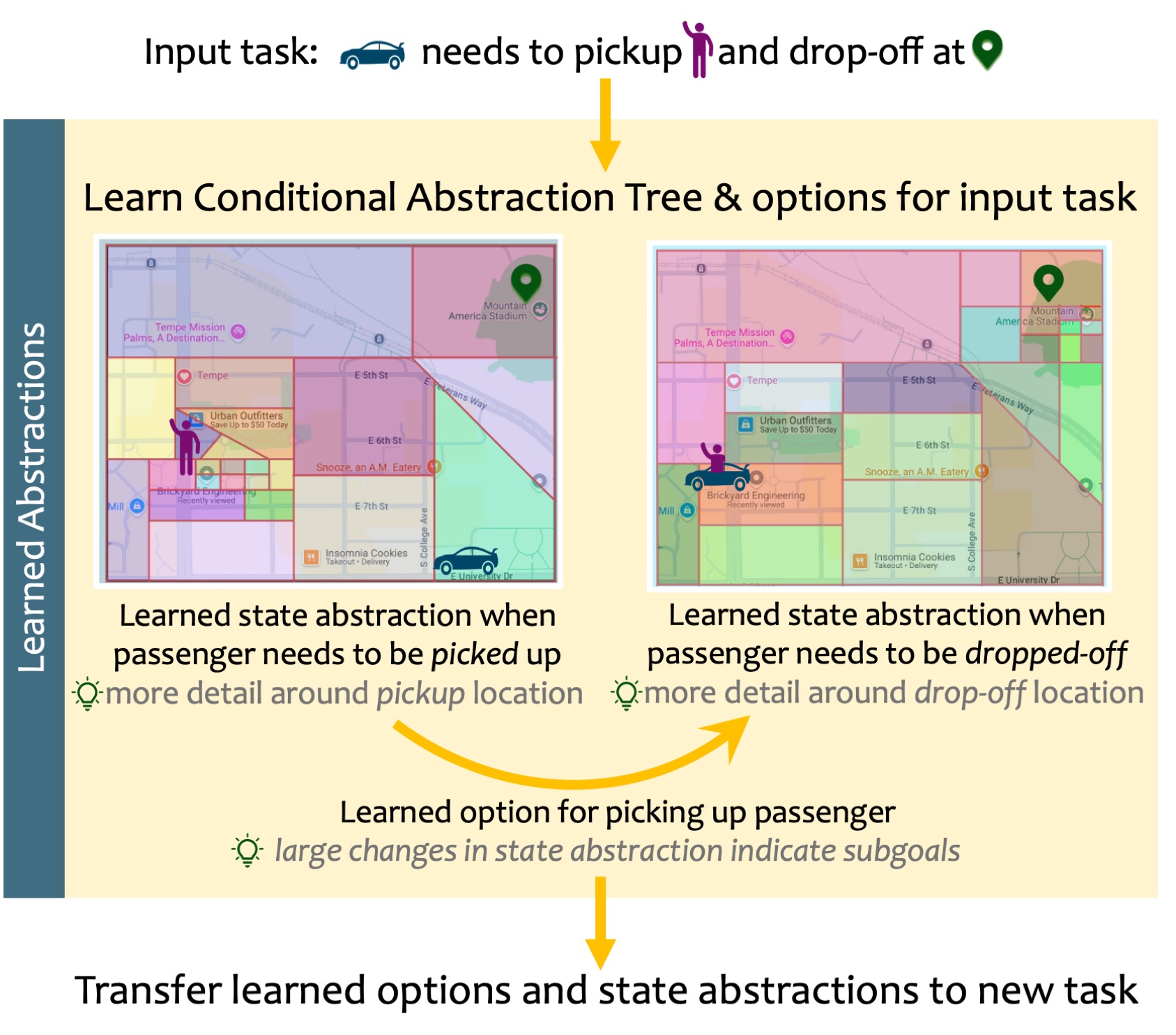
Context-Aware Abstractions for Generalization in RL
Reinforcement learning agents struggle to scale to complex, real-world problems due to sample inefficiency, limited interaction opportunities, and delayed feedback—particularly in long-horizon tasks with sparse rewards and non-stationary dynamics.
We are developing new abstraction algorithms that dynamically learn and utilize context-sensitive abstractions during RL. These methods also support autonomous option invention, and yield stronger cross-task transfer and generalizability.
Papers: