Anytime Task and Motion Policies for Stochastic Environments
Naman Shah, Deepak Kala Vasudevan, Kislay Kumar, Pranav Kamojhalla, Siddharth Srivastava
[Proc. IEEE International Conference on Robotics and Automation (ICRA), 2020]
ICRA 2020 paper
Extended version
Source code
Presentation Video
Videos of experiments
In all the experiments below, "solution" refers to a tree-structured proper policy for the abstract SSP with motion plans for all of the robot's movements.Cluttered Table
Goal: Pick up the black object.- Several objects are crushable, i.e. the Fetch can crush them while picking them up. If the object is crushed it needs to be placed in the recycling box.
- Several objects obstruct the target object, which needs to be replaced somewhere else to replace to reach the target object.
- There is no designated free area where obstructing objects can be stashed.
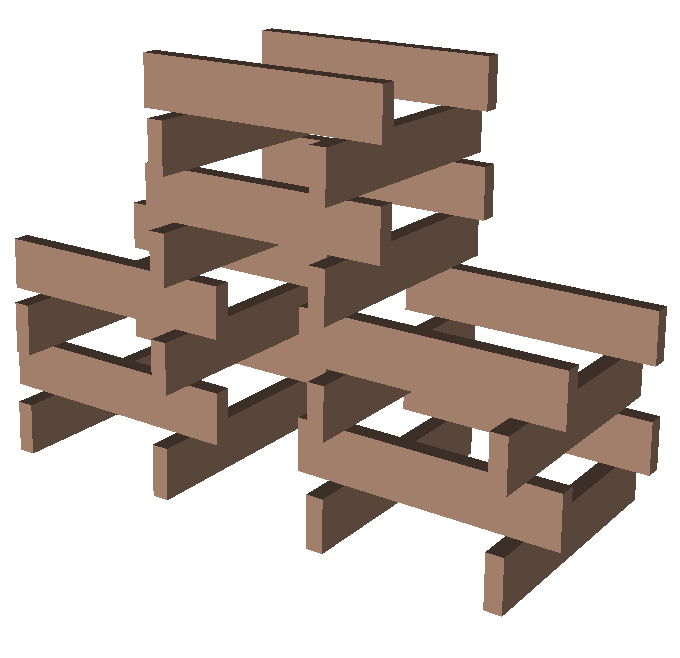
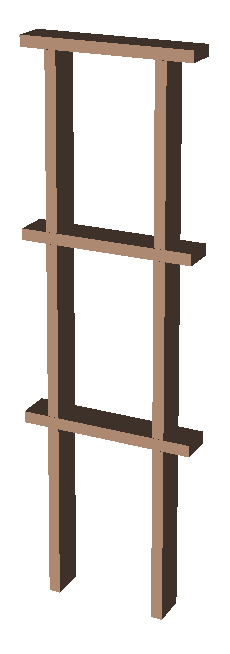
Building structures with Keva planks
Goal: Build the given Keva structure using ABB YuMi.
- The user can place a plank at one of the predefined locations. YuMi observes the environment and picks the plank from that location.
Structure 1: Tower (height: 12)
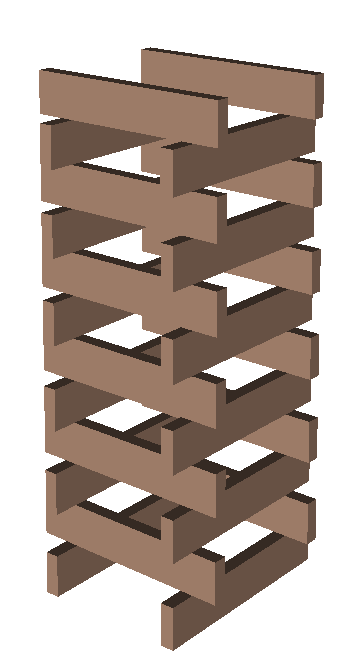
Structure 2: Twisted Tower (height: 12)

Structure 3: 3π
Structure 4: Triple Tower (height: 8)